OEM Solutions
HXROBOT Robotics provides end-to-end custom robotic solutions, meticulously tailored for diverse industries and applications. Whether you’re an entrepreneur, a startup, or an established enterprise, we collaborate closely to engineer an exclusive robotic solution for your specific requirements.
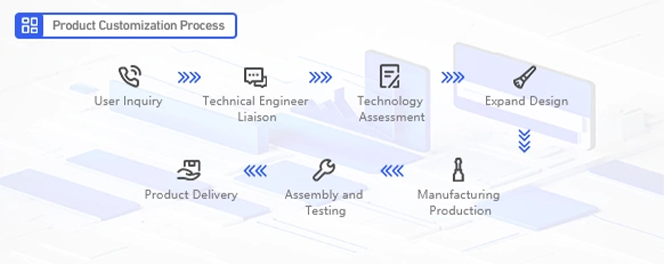
Our customization process includes requirement analysis, technology selection, design, manufacturing, calibration, training, and support. We maintain strict standards at every stage to ensure the final product perfectly meets your actual needs.
Autonomous Operation,
Efficiency Gains
Our custom robots autonomously navigate, identify, and operate, reducing manual intervention needs. This directly translates into improved production efficiency and lower operational costs.
Flexible Integration,
Equipment Compatibility
Our solutions offer high flexibility, enabling seamless integration with other equipment like robotic arms, vision systems, AGVs, and more. This empowers you to build automated, efficient production lines and workflows.
Multilayered Safety,
Reliable Performance
Throughout the entire process, from design to final deployment, we maintain a rigorous focus on safety and reliability, providing multilayered safeguards for a reliable, efficient, and risk-free operational environment for personnel and assets.
Team Complete,
Highly Experienced
Since our establishment in 2019, we have built a comprehensive team structure integrating design, production, R&D, and sales. During this period, we have designed various custom robot chassis and accumulated extensive experience in diverse application scenarios.
Product Cases
Typical Case - Lifting and Transporting Robot for Silkworm Farming Base

Workshop dust periodic testing

Integrated teaching system for AGV scheduling on conveyor belt

High-precision positioning and handling of rollers

Silkworm breeding base lifting and transporting robot
Project Overview
This silkworm rearing experimental base requires an AGV robot with lifting capabilities for the automated handling and transfer of silkworm frames. The core requirement is to automate the entire process of silkworm frame transport from the storage area to the assembly line and then to the idle area, supporting efficient assembly line operations such as frame disinfection and nutrient solution replenishment. Traditional silkworm frame handling often faces problems such as high labor intensity, insufficient handling precision, easy damage to the frames, poor integration with the assembly line, and cumbersome and inefficient processes. This project aims to create a dedicated lifting and handling AGV for the silkworm rearing base. Utilizing magnetic strip navigation technology, it achieves millimeter-level precision positioning to designated work points. Combined with its lifting function, it can stably transport stacked silkworm frames. Working in conjunction with the assembly line’s robotic arms, it completes the fully automated process of picking up silkworm frames from the storage area, transferring them along the assembly line, processing them, and storing them in the idle area. This creates an intelligent silkworm rearing handling system integrating “precise lifting, automatic handling, and assembly line collaboration,” supporting the standardized, efficient, and refined operation of the silkworm rearing experimental base.
Benefits presented
Handling Precision and Efficiency: A single lifting and handling AGV system achieves millimeter-level precision positioning under magnetic strip navigation, accurately docking at designated work points. The lifting mechanism can stably support multiple stacked silkworm frames, seamlessly cooperating with the assembly line’s robotic arms to complete the entire automated process of moving silkworm frames from the stacking area, through assembly line disinfection and replenishment, and finally storing them in the idle area. This process is significantly faster than the 30+ minutes required by traditional assembly lines, greatly improving the efficiency of silkworm frame handling and assembly line operations.
Efficiency Improvement: The system provides a 24/7 reproducible automated handling platform, supporting continuous handling of multiple silkworm frames. Working in conjunction with the assembly line’s robotic arms to complete processes such as disinfection and nutrient solution replenishment, it transforms the previously cumbersome manual handling and docking into a precise and automated intelligent flow. While improving operational capacity and process standardization, the platform completely avoids problems such as damage and silkworm stress caused by manual handling of silkworm frames. It reduces manual handling costs and assembly line preparation time by approximately 75%, allowing aquaculture research resources to be efficiently focused on silkworm breeding experiments. This helps silkworm breeding experimental bases achieve intelligent and refined operation upgrades, ensuring the stability and efficiency of breeding experiments.
Typical Case Study - Terrain Mapping RTK Unmanned Navigation Vehicle
Solar photovoltaic panel cleaning robot

Air-Ground Integrated Unmanned Aerial Vehicle Navigation Vehicle

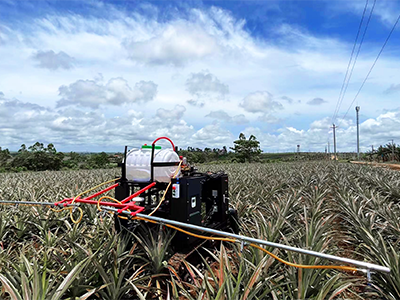
Terrain mapping RTK unmanned navigation vehicle

Multi-functional night patrol vehicle in the park
Project Overview
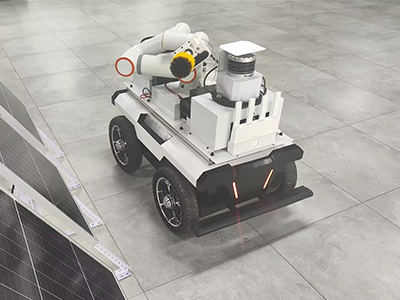
Project Status: A surveying and mapping company conducted large-scale topographic mapping, geological exploration, and field data collection operations. Traditional manual exploration suffers from pain points such as high risks for personnel entering complex terrain, inconsistent mapping descriptions, difficulty in guaranteeing point accuracy, low field efficiency, and poor data consistency. This project, based on a four-wheel differential high-performance navigation chassis, is equipped with the company’s professional exploration and data collection equipment. It adopts an RTK centimeter-level high-precision positioning and navigation solution, and is equipped with an industrial-grade waterproof operation control panel and ultrasonic radar. It realizes the planning of exploration paths, trajectory recording, precise stopping of points, and fully automatic cruise mapping, creating a “unmanned, high-precision, all-weather, and reproducible” intelligent surveying and mapping operation system, which significantly improves the efficiency of field exploration and the reliability of data.
Benefits Presented
Project Status: A surveying and mapping company conducted large-scale topographic mapping, geological exploration, and field data collection operations. Traditional manual exploration suffers from pain points such as high risks for personnel entering complex terrain, inconsistent mapping descriptions, difficulty in guaranteeing point accuracy, low field efficiency, and poor data consistency. This project, based on a four-wheel differential high-performance navigation chassis, is equipped with the company’s professional exploration and data collection equipment. It adopts an RTK centimeter-level high-precision positioning and navigation solution, and is equipped with an industrial-grade waterproof operation control panel and ultrasonic radar. It realizes the planning of exploration paths, trajectory recording, precise stopping of points, and fully automatic cruise mapping, creating a “unmanned, high-precision, all-weather, and reproducible” intelligent surveying and mapping operation system, which significantly improves the efficiency of field exploration and the reliability of data.
Benefits: Precision and Stability:The system employs RTK real-time differential positioning, ensuring that the positional error of work points can be stably controlled within 5cm. It supports defined routes, multi-point cruising, and trajectory reproduction, completely resolving issues such as trajectory drift, inaccurate point marking, and data inconsistency caused by manual surveying. This meets the professional needs of high-precision topographic mapping, geological exploration, and route surveying.
Increased Data Collection Rate:The unmanned vehicle can replace manual labor in high-risk/complex areas such as steep slopes, muddy terrain, and remote fields. A single mission can continuously cruise for several kilometers, increasing fieldwork efficiency by over 60%. This fully automates data collection, eliminating the need for on-site personnel and significantly reducing the intensity and safety risks of fieldwork.
Typical Case Study - Multifunctional Low-Speed Unmanned Vehicle Teaching Platform
GAC Group's special vehicles for teaching, research, and competition
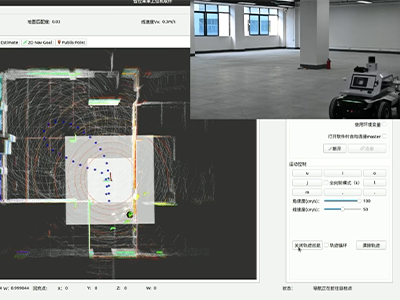
Indoor 3D mapping and navigation

Multifunctional Low-Speed Unmanned Vehicle Teaching Platform

Heavy-duty hydrogen-powered teaching and navigation equipment
Project Overview
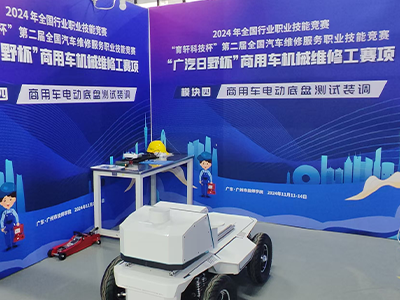
Project Overview: This university’s majors in Intelligent Connected Vehicles, Autonomous Driving, and Robotics Engineering require the construction of a multi-functional, integrated teaching and training platform for low-speed unmanned vehicles to meet the full-process teaching needs from basic hardware knowledge to the development of advanced autonomous driving algorithms. Traditional teaching equipment generally suffers from drawbacks such as closed structures that are difficult to disassemble, single sensors, opaque communication protocols, inability to simultaneously support outdoor positioning and indoor navigation, and difficulties in implementing advanced frameworks such as Autoware, making it difficult to support systematic training in the field of intelligent connected unmanned vehicles. This project is based on a modular, detachable low-speed unmanned vehicle chassis, equipped with a complete sensor array and ROS open-source architecture, integrating multiple types of perception devices such as LiDAR, millimeter-wave radar, ultrasonic radar, and high-definition cameras. It supports serial communication development, sensor principle teaching, open-source SLAM navigation, Autoware autonomous driving framework, outdoor RTK high-precision positioning, and AI visual recognition, creating a comprehensive teaching platform that integrates hardware assembly and disassembly, sensor debugging, software development, autonomous driving verification, and intelligent connected vehicle training, fully meeting the needs of university courses, experiments, course design, and scientific research innovation in the field of intelligent connected unmanned vehicles.
Benefits presented
Teaching Coverage and Training Efficiency: One multi-functional low-speed autonomous vehicle platform can simultaneously support integrated training across multiple modules, including hardware disassembly, sensor debugging, serial communication, ROS development, SLAM mapping, Autoware autonomous driving, RTK outdoor navigation, AI object recognition, and intelligent traffic light decision-making. It covers the entire teaching chain from beginner to advanced levels, significantly reducing the time required for a single complete autonomous driving process demonstration and verification, improving teaching efficiency by over 60% compared to traditional distributed equipment.
Effectiveness Enhancement: The platform implements a fully open-source, disassembleable, easily debuggable, and reproducible standardized teaching model. It supports multiple groups of students simultaneously conducting hardware disassembly and assembly, code development, algorithm verification, and real-vehicle testing, transforming abstract autonomous driving and intelligent connected vehicle theories into visual, operable, and verifiable immersive training. While significantly improving teaching capacity and course quality, the platform reduces equipment maintenance and experimental preparation costs by approximately 60%, effectively avoiding problems such as hardware damage, complex wiring, and high risks of actual vehicle debugging in traditional teaching. This allows teachers and students to efficiently focus on core technology research and innovative practices such as sensor fusion, path planning, target detection, intelligent decision-making, and network communication.
Typical Case - Multifunctional Indoor and Outdoor Pipeline Inspection Vehicle

Multi-functional inspection vehicle for indoor and outdoor pipelines
Leaf and branch identification teaching and research platform

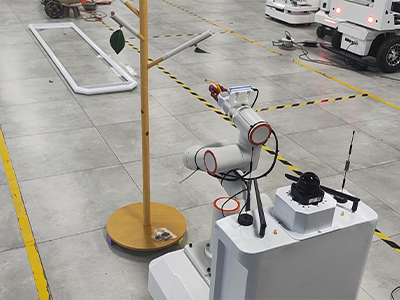
Body-embody intelligent lifting and grasping robot

Agricultural Research Institute's four-turn sprinkler truck
Project Overview
This company requires a dedicated four-wheel-drive pipeline inspection robot suitable for both indoor and outdoor environments. This robot will be used for comprehensive inspection of both outdoor and indoor pipelines. The core requirement is seamless integration between indoor and outdoor inspection scenarios, while simultaneously achieving accurate detection of the internal condition of pipelines and anomalies beneath them. Traditional pipeline inspection often faces problems such as cumbersome switching between indoor and outdoor navigation, laser navigation failure due to similar fixed features of outdoor pipelines, limited field of view inside pipelines, difficulty in detecting anomalies beneath pipelines, low inspection efficiency, and potential safety hazards for personnel. This project addresses these issues by developing a four-wheel-drive pipeline inspection vehicle that integrates a dual-line navigation system (indoor single-line laser navigation + outdoor RTK navigation), coupled with a gimbal camera and dedicated under-vehicle detection instruments. This enables free switching between indoor and outdoor navigation, visual inspection of pipeline interiors, and monitoring of noise and temperature anomalies beneath pipelines. The system constructs an intelligent pipeline inspection system integrating “navigation switching, comprehensive detection, and anomaly early warning,” supporting the company’s efficient, safe, and accurate pipeline inspection operations.
Benefits presented
Navigation Adaptation and Inspection Efficiency: A single inspection system allows for seamless switching between indoor single-line laser navigation and outdoor RTK navigation, perfectly resolving the laser navigation failure issue caused by similar fixed features of outdoor open-air pipelines. Indoors, it accurately adapts to scenarios such as pipeline machine rooms and narrow passages; outdoors, it enables precise navigation along open-air pipelines. A single complete inspection (including indoor and outdoor pipeline sections) takes over 80% less time than traditional manual inspection, completely eliminating the limitations of manual inspection in complex scenarios.
Efficiency Improvement: The system provides a 24/7 reproducible automated inspection platform, supporting real-time data transmission, anomaly point marking, and historical data tracing. It transforms the inspection mode, which previously relied on manual observation and recording, into precise and automated intelligent detection. While improving inspection coverage and accuracy, the platform completely avoids the safety risks of personnel entering narrow pipelines and high-altitude open-air pipeline areas for inspection.
Typical Case - Orchard Follow-up Tracked Transport Vehicle

Orchard Follows Tracked Transport Vehicle

RTK satellite navigation for crop transport

Urban patrol small tracked vehicle
Large-scale agricultural crop disinfection spraying vehicle
Project Overview
This company requires a tracked follow-me transport vehicle specifically designed for orchards, used for material transfer during fruit harvesting. The core requirement is precise following of harvesters to assist them in fruit collection and transfer, reducing labor intensity and improving harvesting efficiency. Traditional orchard fruit harvesting often faces problems such as high labor intensity in fruit handling, low efficiency of manual transfer, harvesters needing to juggle both picking and handling, and difficulties in navigating complex orchard terrain with ordinary vehicles. This project addresses these issues by developing an orchard follow-me tracked transport vehicle integrating ultrasonic radar and a UWB following system. Harvesters only need to wear a special wristband or carry a remote control, and the vehicle will automatically maintain a safe distance and precisely follow them. With a high load capacity of 300KG, it enables immediate collection and transfer of harvested fruit, creating an intelligent orchard transport system that integrates precise following, efficient handling, and adaptability to complex terrain, supporting the company’s efficient and labor-saving orchard harvesting operations.
Benefits
Follow-up Adaptation and Transportation Efficiency: A single orchard-following tracked transport vehicle, working in conjunction with a UWB following system and ultrasonic radar, achieves precise following of harvesters, automatically maintaining a safe distance. No manual operation is required, allowing harvesters to focus on fruit picking.
Efficiency Improvement: The system enables reproducible, all-weather automated transport operations, supporting adjustable following distance and remote start/stop control. It transforms the previous reliance on manual carrying and back-and-forth transport into a highly efficient and labor-saving intelligent following transport system. While improving orchard harvesting and transport efficiency, the platform completely avoids labor injuries caused by prolonged heavy-duty carrying by harvesters, reducing manual transport costs by approximately 65%.
